JDAドローンExperiment 飯沼 純一
【JDAドローンマガジン 2022年11月11日掲載】
日本ドローン協会(以下JDA)の理事の飯沼純一です。
今回は、ドローン用緊急パラシュート実証実験について話していきたいと思います。
福島県の浪江町に所在します福島ロボットテストフィールドの浪江飛行場で、とある県の公立大学と当協会のコラボによる実証実験を実施致します。
現在のドローンが何かのトラブルでローターが停止してしまうと、ほとんどのドローンが墜落若しくは暴走してしまいます。
しかし、何と我々JDAでは6年も前から緊急パラシュートの研究を、大学と非破壊検査会社とのコラボで実証実験を繰り返して参りました。
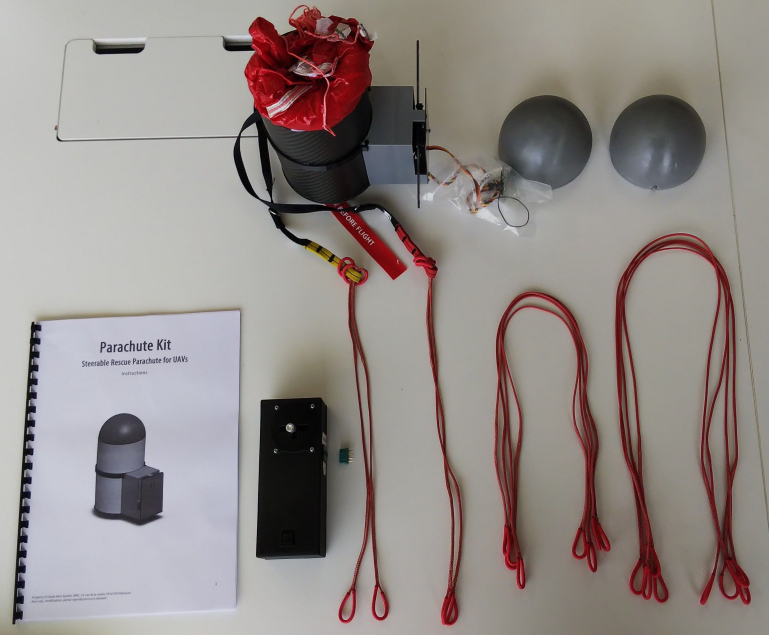
特筆する点としましては、
- 火薬を一切使用しないので安全である。
- パラシュートは何回でも折り畳んで再使用できるので、環境にやさしい。
- 小型軽量設計の為、中型ドローンから搭載が可能である(DJI Matrice200シリーズ、Inspire2等)。
- ブレーキライン操作と左右アーム機構により、パラシュートの降下ポイントの位置調整が可能である。
上記で1~3までは成功しておりますが、4に関しては調整し今年度中に最終実証実験を実施予定です。

実験結果としましては、以下の通りです。
ドローン用パラシュート実験報告
データは 3 回の落下実験の内、1 回目(高度 40m から落下)、3 回目(高度 75m から落下)について取得したものです。
残念ながら 2 回目の落下のデータは取得できていません。
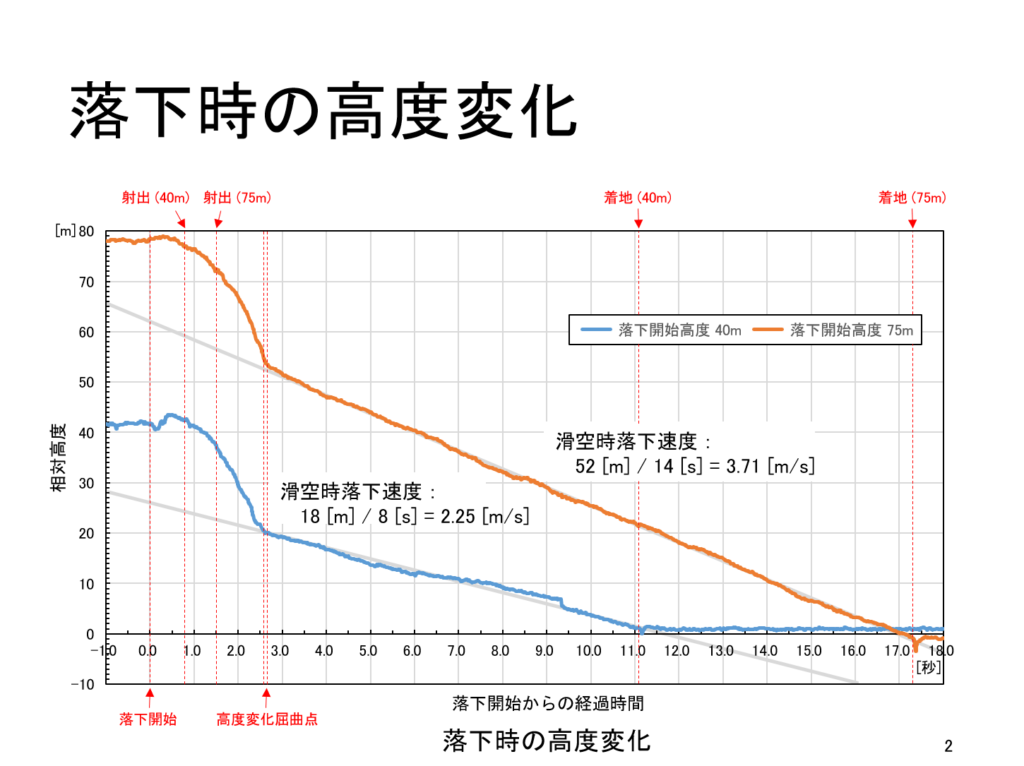
上記の図は、落下時の高度変化を示しています。
いずれの落下も,落下開始直後は自由落下し、滑空後は時間に対して一定速度で落下している様子が確認できます。
理由は定かではありませんが、1 回目と 3 回目の落下時では、滑空時落下速度が若干異なるようです。
ここで自由落下のカーブから一定落下速度の直線への変化点を「高度変化屈曲点」として示していますが、ここで滑空状態に入ったことが予想されます。
つまりは、パラシュートによる緊急回避行動「滑空飛行」が成功したことになります。
今後は、この滑空飛行状態で、ブレーキや操舵を実施し、目的の緊急回避場所まで操舵できるかがポイントになります。
最終実験後にまた追ってご報告したいと思います! 今回もご覧頂きましてありがとうございました~(^^♪